
A study on the stabilization and controller design for directional pan-tilt system
1충남대학교 기계공학과 2충남대학교 기계공학과This paper presents the stabilization and design of a pan-tilt control part for the directional pan-tilt system for shipboard directional equipment. In order to control each control axis with compensation for ship motion, the 2 degree of freedom(2DOF) PID controller is designed and its parameters are tuned using a real- coded genetic algorithm(RCGA). Simulation demonstrates the effectiveness of the 2 DOF PID controller tuning.
초록
본 논문은 2축 구조를 가진 안정화 지향성 Pan-Tilt 시스템을 개발하기 위한 기초연구로서 2축 Pan-Tilt와 Pan-Tilt 구동 하드웨어 보드를 제작하고 표적 추적을 위한 제어기를 설계하는 내용이다. Pan-Tilt 시스템을 6 자유도 선박운동 시뮬레이터에 탑재하여 테스트 환경을 구축하고 RCGA를 이용하여 Pan-Tilt의 모델 매개변수를 추정한 다음, 추정된 모델과 RCGA에 기초하여 시뮬레이션과 실험을 수행함으로써 2 자유도 PID 제어기 동조의 유효성을 검토한다.
Keywords:
Directional equipment, Directional pan-tilt, 2 DOF PID controller, RCGA, 지향성 장비, 지향성 Pan-Tilt, 2 자유도 PID 제어기, 실수코딩 유전알고리즘1. 서 론
첨단기술의 발달과 함께 해운의 환경이 끊임없이 변화하고 있다. 세계 물동량의 98% 이상을 처리하는 선박은 점점 대형화·고속화 되고 있으며 선박을 통한 여객 및 화물운송, 어로작업 및 불법어로 감시, 해적퇴치와 같은 군사작전 등의 중요성이 부각되고 있다.
선박에서 사용하는 대표적인 지향성 장비에는, 위성 통신이나 위성 방송 서비스를 위한 위성 추적용 안테나가 있고, 군용으로 함정에서 쓰는 사격통제 시스템, 주/야간 감시카메라 및 레이저 서치라이트가 장착된 Night Vision System (NVS) 등이 있다.
선박용 지향성 Pan-Tilt는, 선박에서 사용하는 지향성 장비가 기구적으로 지향성을 유지하도록 모션을 만들어주는 기계적인 장치이다. 이러한 지향성 장비는 지향성이 보장되어야 제 기능을 할 수 있다.
최근에는 해양이 영토로서의 기능이 점차 중요시되면서, 배타적 경제수역(EEZ) 일대의 어업권의 확보와 해상보안 문제가 세계적인 관심사로 대두되고 있다. 우리나라는 지리적인 특성상 반도에 위치하고 있어, 해상에서 중국, 일본, 북한, 러시아 등과 많은 국제분쟁의 요소를 가지고 있는 실정이다. 이와 더불어 좌초, 침몰, 충돌로부터 운항중인 선박의 시계 확보, 불법어로의 효율적 단속, 해상에서의 범죄행위에 대한 증거를 확보 및 하기 위해 국제 분쟁 해결을 위해 어업지도선 및 해경 경비함 등에 NVS를 탑재하여 운용하고 있다.
선박용 NVS는 크게 항해용 및 해상감시용으로 나눌 수 있다. 항해용은 레이더에 포착되지 않는 물체나 근접 해상 상황을 영상으로 관찰하기 위한 것으로서 추적 기능이나 정밀한 동요 안정화 기술이 소요되지 않는다. 반면에 해상 감시용 NVS는 운항중인 선박의 운동을 실시간으로 보상하면서, ARPA 레이더로부터 표적 정보, Gyro로부터 자선의 선수방향 정보, GPS로부터 자선의 위치정보를 받아서, 표적까지의 상대방위와 거리를 계산하여, 카메라가 탑재된 Pan-Tilt가 표적을 지향, 추적하면서 포착된 영상을 모니터에 표시하고 또한 DVR에 기록함으로써, 해상 범죄 행위에 대한 증거물 확보를 위한 장치이다. 이를 위하여 고성능 탐조등과 주야간 카메라 및 레이저 서치라이트가 함께 장착되는 고정도 Pan-Tilt의 설계 제작 기술과 Pan-Tilt의 동요안정화(stabilization) 및 추적 기술이 요구된다.
실제 선박의 운동은 회전운동과 병진운동을 가지는 6자유도 운동을 하게 된다. 따라서 지향성 Pan-Tilt는 이러한 선박의 움직임을 보상하여 지향성 장비가 항상 지향성을 유지할 수 있도록 하는 동요안정화 기능을 가져야 한다[1][2].
일반적으로 지향성 Pan-Tilt는 지향성 장비에 따라 동요안정화의 정도가 달라진다. 위성 안테나용 Pan-Tilt는 주파수 대역에 따라서, C-Band일 경우 0.6도, Ku-Band일 경우 0.9도, L-Band일 경우 1.2도의 안정화 정도를 가져야 한다. 또한 위성 안테나의 경우 위성신호의 세기를 측정하기가 용이하기 때문에 고가의 자이로 센서를 사용하지 않고 선박 운동에 대한 보상이 가능하다. 또한, Pan-Tilt의 구동 액추에이터에 대해서도 고정도의 정밀도를 요구하지 않는다.
반면에, 본 논문의 연구 대상인 선박용 NVS용 Pan-Tilt의 경우, 선박의 운동을 보상하기 위해 특성이 좋은 고가의 자이로 센서가 요구되고, 구동 액추에이터도 약 0.1도 이하의 고정도의 동요안정화 정도가 요구된다.
따라서 본 논문에서는 조건을 만족하는 방위각과 고각의 2축 구조를 가지는 고정도 Pan-Tilt 시스템과 구동용 하드웨어 보드를 설계 제작하며, Pan-Tilt의 모델과 실험 데이터로부터 시스템의 파라미터를 추정하고, Pan-Tilt 구동 드라이버 외부에 2자유도 PID제어기를 삽입하여 원활한 외란억제성능과 신속한 설정치 추종성능을 동시에 향상시키고자 한다. 이를 위한 최적화 도구로서 RCGA[3]를 이용하고 시뮬레이션과 실험을 수행함으로써 유효성을 검증하고자 한다.
2. 선박의 운동 및 좌표계 변환
2.1 선박의 운동
운항중인 선박은 Figure 1과 같이 6자유도 운동을 하게 된다. 이 운동은 선박의 중심에 직교 좌표축을 일치시켰을 때, 롤(Roll), 피치(Pitch) 및 요(Yaw)의 회전운동 성분과 서지(Surge), 스웨이(Sway) 및 히브(Heave)등의 병진운동 성분을 가진다.

6 Degree-of-freedom components of ship motions
선박에서 표적을 지향할 경우, 회전운동 성분은 지향각에 절대적인 영향을 미치게 된다. 특히 회전운동 중 롤과 피치성분은 Pan-Tilt의 수평오차를 요 성분은 방향오차를 발생시키는 요인이 된다. 선박에 장착되는 NVS용 Pan-Tilt는 선박의 6 자유도 운동을 실시간으로 보상하여 표적을 추종하고, 원거리에 있는 표적을 지향하기 위한 고정도 안정화 기능을 가져야 한다. 일반적으로 선박의 운동을 추정하기 위해 주로 선형 파도모델 근사화가 이용되며, 파도모델 중 자주 사용되는 표현 형식은 감쇠항을 가지는 2차 모델이며 다음과 같다[4][5].
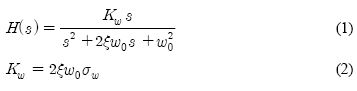
여기서, Kw는 게인, σ는 파도 강도 상수, ξ는 감쇠 계수, w0는 파도의 주파수이다.
2.2 좌표계 변환
해상에서 선박의 움직임은 표적의 위치를 나타내기 위한 좌표계 기준 프레임의 변화를 유발한다. 선박의 운동에 따른 좌표계 기준 프레임의 변화에는 평행이동과 회전 등이 있다. Figure 2와 같이 프레임에 평행하게 이동하는 좌표계 변위(Displacement)의 경우, 패럴랙스(Parallax)문제가 유발되며, Figure 3과 같이 거리는 변화가 없고 방향만이 변하는 좌표계의 회전(Rotation)이 일어났을 때, 안정화(Stabilization)의 문제가 야기된다.

Displacement of coordinate system

Rotation in spherical coordinate system
지향성 Pan-Tilt가 선박의 동요에 관계없이 항상 표적을 지향하기 위해서는 선박의 운동을 정확하게 계측하여, 선박의 운동에 따른 기준 프레임의 패럴랙스와 안정화를 고려하여 Pan-Tilt를 구동할 수 있는 좌표계로의 변환이 필요하다.
구면 좌표계에서는 롤-피치-요를 계산하기가 까다로우므로 먼저 직교 좌표계로 변환한 후 롤-피치-요롤 적용하고 다시 구면 좌표계로 변환한다. 좌표 변환 과정은 Table 1과 같다.

Coordinate transformation process
위의 Table 1에서 ①, ②, ③ 의 과정을 거쳐서 측정된 선박의 동요정보를 이용하여 계산되는 Pan-Tilt지향각 계산식은 정리하면 식 (3)∼(4)와 같다.
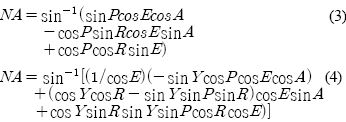
여기서 E와 A는 이전의 Pan-Tilt 지향각인 고각과 방위각이고, R, P, Y는 3축 각속도 센서에 의해 측정된 선박의 동요인 롤, 피치, 요이며 NE와 NA는 새로 계산된 Pan-Tilt 지향각인 고각과 방위각이다.
Figure 4는 좌표 변환에 대한 시뮬레이션 결과를 나타낸 것이다. (a)는 선박의 외부에서 관측자가 보았을 때 표적은 정지한 상태에서 선박이 운동하는 것이고, (b)는 선박의 데크상에서 표적을 보았을 때 상대적인 표적의 움직임이며, (c)는 측정된 선박의 롤, 피치, 요의 3축 데이터를 나타내며, (d)는 (c)의 데이터를 기반으로 좌표변환을 통해 계산된 Pan-Tilt의 2축 지향각인 방위각과 고각이고, (e)는 계산된 방위각과 고각의 좌표를 따라 2축 Pan-Tilt가 표적을 추종하는 것을 보여주는 결과이다.

Coordinate transform simulation
3. 지향성 Pan-Tilt의 설계 및 구현
3.1 2축 Pan-Tilt
본 논문에서 제안하는 지향성 Pan-Tilt 시스템 개발용 테스트 환경은 Figure 5와 Figure 6의 2축 Pan-Tilt와 모션베이스(Motion Base)로 구성된다.
모션베이스는 실제 선박의 6자유도 운동을 만들어주는 선박운동 시뮬레이터이며, Pan-Tilt는 방위각과 고각의 2축으로 독립적인 회전운동을 할 수 있도록 설계되었다. 실제 실험은 모션베이스위에 2축 Pan-Tilt와 3축 광자이로센서를 고정시키고 선박의 6자유도 운동 중 회전성분인 롤, 피치, 요의 운동을 임의로 만들어 실험하였다.
2축 Pan-Tilt 모델에 대한 전달함수 Gi(s0는 다음과 같은 형태로 나타낼 수 있다.

여기에서 Ki , Ti (i = α, e)는 지그 모델의 파라미터이고 α, e는 각각 방위각과 고각 모델을 나타낸다.

Biaxial Pan-Tilt

Ship-Motion Simulator

4. 2자유도 PID 제어기 설계
2축 지향성 Pan-Tilt는 파도, 바람 등 예측할 수 없는 외란이 존재하는 환경에서 필요한 데이터 확보를 위해 표적을 정확히 추종하는 안정화 기능을 가져야 한다. 현재까지 많은 제어 알고리즘들이 제안되어 왔음에도 불구하고 아직도 PID 제어기가 많이 사용되므로 본 연구에서도 PID 제어기를 사용한다.
기존의 PID 제어기는 설정치 추종성능이 좋도록 동조되면 외란억제 성능이 나빠지고, 외란억제 성능이 좋도록 동조되면 설정치 추종성능이 나빠지는 한계를 가지고 있었다. 이러한 한계를 극복하기 위해 Horowitz는 2 자유도 PID 제어기[6]를 제안하였지만, 동조해야될 파라미터의 수가 증가하는 단점 때문에 사용되지 못하다가, 전역 최적화 알고리즘들[7]이 제안되고 실제 플랜트에 대한 실효성이 인식되면서 많은 연구가 진행되고 있다[8]. 따라서 본 논문에서는 제어기로는 목표치 추종과 외란제거 성능을 동시에 개선할 수 있는 2 자유도 PID 제어기가 사용된다. 또한 2축 Pan-Tilt의 롤과 피치 축은 각각 독립적으로 제어되고 제어시간은 외란의 변화시간에 비해 매우 짧은 것으로 가정한다. 제어대상은 센서를 포함한 2축 Pan-Tilt이고, Figure 8은 방위각과 고각 모터 제어를 위한 2 자유도 PID 제어기의 구조를 보여주며, 각각의 전달함수는 식 (6)-(8)으로 주어진다.

2자유도 PID Control System
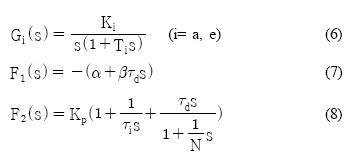
그림에서 r, y, d는 각각 목표치, 출력, 외란이고, Ki, Ti (i= a, e)는 제어대상의 매개변수이고 첨자 a는 방위각을, e 는 고각을 의미한다. 2 자유도 PID 제어기의 전달함수 F1은 목표치 신호의 피이드포워드 보상이며, F2는 오차에 대한 피이드백 보상을 의미하며 α, β는 0과 1사이의 값으로서 비례동작과 미분동작을 제어하는 역할을 수행하며, Kp,τi,τd, N은 제어기의 매개변수이다. 특히 미분동작의 필터링 효과를 주는 요소 N은 경험적으로 3-10 사이에서 선택된다[9].
2 자유도 PID 제어기는 모델과 RCGA[4]를 기반으로 동조되며 다음의 Table 2의 과정에 따라 수행된다[5].

Tuning process of model and control parameters
모델의 매개변수 추정에서 RCGA는 시스템의 출력과 모델의 출력 차e(t) = y(t) - ym(t)의 제곱적분값이 최소가 되도록 2축 Pan-Tilt 모델의 매개변수를 조정하게 된다.

여기서 φ = [Ki, Ti]T(i= a, e)이고, tf는 최종적분 시각이다. 또한 2 자유도 PID 제어기의 동조에서 RCGA는 목표치와 출력의 차e(t) = r(t) - y(t)의 함수가 최소가 되도록 제어기의 계수를 조정하게 된다.

여기서 φ = [α, β, Kp, τi,τd]T이다.
4. 실험 및 시뮬레이션
3.1 회전운동 외란성분
본 연구에서 제안하는 선박용 NVS용 지향성 2축 Pan-Tilt 테스트 환경은 Figure 9와 같으며, 선박의 운동을 분석하기 위해 실제 선박을 이용하여 부산에서 제주까지 항해하는 동안의 선박의 롤, 피치, 요 성분을 계측하였다. Figure 10는 각각 롤, 피치, 요 3가지 성분의 파워 스펙트럼을 나타낸 것이다. 롤과 요는 0.67 rad/sec의 주파수가 주로 영향을 미치며, 대상선박인 한바다호가 크기 때문에 피치 성분은 동요가 거의 없음을 보여준다.

Test environment

Time series and power spectrum
실험을 통해 데이터를 얻고 제어대상의 매개변수 Ki = 1, Ti = 0.02를 얻었다. N = 10을 사용하여 2 자유도 PID 제어기를 동조한 결과α = 0.1, β = 0.3 Kp = 31,τi = 0.04 τd = 0.03을 얻었다. Figure 12 (b)의 외란을 가정하여 Figure 11의 블록선도로 시뮬레이션을 실시한 결과 Figure 12 (a)의 응답 결과를 얻을 수 있었다.

Simulation diagram

Simulation result
5. 결 론
본 논문은 선박용 NVS용 지향성 Pan-Tilt의 안정화에 대한 내용으로써, 2축 Pan-Tilt와 구동보드를 제작하여, 매개변수 추정 및 제어기 동조에 대한 연구를 진행하였다. 2축 Pan-Tilt와 Motion Base를 결합하여 실험환경을 구축하고 데이터를 취득하였으며, RCGA를 이용하여 2축 Pan-Tilt의 모델 매개변수를 얻었다.
추정된 모델과 RCGA를 이용하여 2 자유도 PID 제어기의 파라미터를 유도함으로써 제어기를 설계하였다. 시뮬레이션 및 실험을 통하여 제안한 2 자유도 PID 제어기의 성능을 확인할 수 있었다.
References
-
W.-Y. Koh, S.-W. Hwang, and G.-G. Jin, “Stabilization and tracking algorithms of a shipboard satellite antenna system”, Journal of the control, automation and systems engineers, 8(1), p67-73, (2002).
[https://doi.org/10.5302/J.ICROS.2002.8.1.067]

- KVH Industries Inc, (1994), KVH Active Stabilized Antenna Pedestal technical manual.
- G.-G. Jin, Genetic Algorithms and Their Applications, KyoWoo Sa, (2000).
- T. I. Fossen, Guidance and Control of Ocean Vehicles, John Wiley&Sons, N. Y, (1994).
- S. Salid, N. A. Jessen, and J. G. Balchen, “Desing and analysis of a dynamic positioning system based on kalman filtering and optimal control”, IEEE Tran. on Automatic Control, AC-28(3), p331-339, (1983).
- I. M. Horowitz, Synthesis of Feedback Systems, NewYork Academy press, (1963).
- J. H. Holland, Adaption in Natural and Artificial System, The University of Michigan Press, Michigan, (1963).
- M. Araki, and H. Taguchi, “Two degree of freedom PID controllers”, International journal of the control, automation and systems, 1(4), p401-412, (2003).
- K. J. Astrom, and T. Hagglund, PID Control Theory Design and Tuning, ISA(Instument Society of America).