
Implementation and field test for autonomous navigation of manta UUV
This paper describes the development and field experiments of Manta-type Unmanned Underwater Vehicle (UUV). Various simulations for Manta UUV are performed by using the nonlinear 6-DOF motion of equations. Through this simulation we verified the motion performances of Manta UUV. To acquire the blueprint of Manta UUV, it was designed with the simulation results. The Manta UUV uses a Doppler Velocity Log (DVL), gyrocompass, GPS, pressure sensor and other minor sensors, applied to measure the motion, position and path of Manta UUV. For its propulsion and changing a direction in the underwater, one vertical fin and four horizontal fins are installed at the hull of UUV. The Manta UUV system was verified with motion and autonomous navigation test at field.
초록
본 논문은 만타형 무인잠수정의 개발과 실해역 성능시험에 관한 내용을 다룬다. 먼저 만타형 무인잠수정의 운동성능을 예측하기 위한 시뮬레이션을 수행하였다. 시뮬레이션 결과를 통해서 만타형 잠수정의 운동성능을 검증하였으며 결과를 바탕으로 테스트베드인 만타형 무인잠수정을 설계하였다. 만타 잠수정은 자세 및 경로의 계측을 위하여 DVL (Doppler Velocity Log), Gyrocompass, GPS, 압력센서 등을 탑재하였으며 운항제어를 위한 추진기와 1개의 수직타 4개의 수평타를 장착하여 3자유도 운동이 가능하다. 실해역에서 운동성능시험과 자율운항 성능시험을 통해 만타형 무인잠수정 시스템을 검증하였다.
Keywords:
Unmanned Underwater Vehicle, Autonomous Underwater Vehicle, Manta UUV, Autonomous Navigation, 무인 잠수정, 자율무인 잠수정, 만타형 무인 잠수정, 자율 경로 주행1. 서 론
무인 잠수정(Unmanned Underwater Vehicle:UUV)은 일반적으로 자율성에 의해서 분류되는데, 사용자가 직접 조종하는 형태의 ROV (Remotely Operated Vehicle), 주어진 임무를 자율적으로 수행하는 AUV (Autonomous Underwater Vehicle)등이 있다. 무인 잠수정은 미국에서 1952년부터 개발되기 시작 하였으며 사용자가 조종하는 ROV가 주를 이루었다. AUV의 경우에는 1980년대 과학기술의 발전을 바탕으로 발전하였으며 군용 목적으로 많은 개발이 이루어졌고 최근에는 과학적, 상업적 목적으로도 많은 개발이 이루어지고 있다[1].
미해군의 NUWC (Naval Undersea Warfare Center)에서는 1990년대 중반부터 MTV (Manta Test Vehicle)의 연구를 수행하고 있다. 일반적으로 어뢰 형상의 잠수정이 주류를 이루고 있지만, MTV의 경우 잠수함 표면에 붙어 있다가 필요시에 잠수함 표면에서 분리되어 임무를 수행하는 새로운 개념을 도입한 형태이다. 국내에서도 이러한 선진 무인잠수정 기술에 대응하기 위하여 만타형 무인잠수정에 대한 전산 유체역학에 의한 운동 모델링 및 운동 시뮬레이션 연구가 활발히 진행되고 있다[2][5][8].
일반적인 무인잠수정의 선형은 상하좌우 대칭형 이다. 만타형 무인잠수정의 경우 상하가 대칭이 아니며 이러한 형상에 대한 국내 연구는 많이 이루어지지 않았다. 본 논문은 새로운 선형인 만타형 무인잠수정에 대한 구속모형과 운동수학모델 연구에서 더 나아가 실제 테스트 베드인 만타형 무인잠수정를 개발하고, 실해역에서의 운동성능 및 자율운항실험을 수행하는 연구를 수행하였다. 또한, 시뮬레이션과 유사한 형태의 운동성능을 가지고 있음을 확인하였으며, 실해역에서 경로 주행을 실시한 결과를 기술 하였다. Figure 1은 개발된 만타형 무인잠수정의 모습을 나타낸 것이다.

Overview of Manta UUV
2. 수학 모델링 및 제어기 설계
2.1 만타형 무인 잠수정의 수학 모델
만타형 무인 잠수정을 개발하기에 앞서 수학적 모델을 통해서 운동 성능과 구동 방식에 대한 검증이 필요하다. 만타형 무인잠수정의 수학 모델은 Planar Motion Mechanism Test 등으로 구해진 유체동역학계수를 사용하여 6자유도 운동방적식에 적용하여 유도하였다.
6자유도 운동방정식은 상당수의 유체동역학계수에 의한 힘과 모멘트로 표현된다. 만타형 무인잠수정의 수학모델을 정의하기 위해 선체를 강체라 가정하고 Figure 2와 같이 선체고정좌표계와 지구고정좌표계를 사용하였으며 선체고정좌표계의 원점을 상하좌우의 중심부로 정하여 선수방향을 x, 우현방향을 y, 연직 아래 방향을 z축으로 하는 오른손 좌표계를 사용하였다.
만타형 무인잠수정의 x, y, z축에 대한 병진운동과 회전운동을 6자유도 운동으로 표현하였으며 사용된 좌표축과 명칭은 Table 1과 같다.

Coordinate system of Manta UUV

Notation
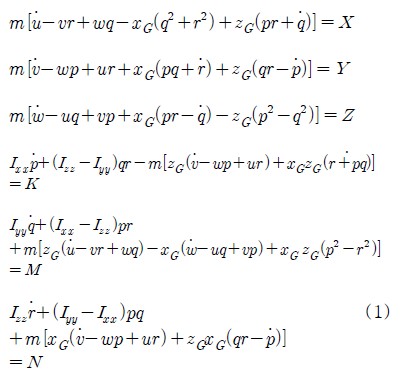
6자유도 시뮬레이션에 이용된 운동방정식은 Abkowiz가 전개한 기본식을 사용하였으며[3]-[5] 식 (1)은 사용된 6자유도 운동방정식의 기본식을 나타낸다. 식 (1)은 강체(Rigid body)에 대한 힘과 모멘트를 Newton의 운동방정식에 적용하여 나온 식이며, 각 방향의 힘 X, Y, Z와 모멘트 K, M, N은 세분화된 힘과 모멘트의 합이며, 이는 중력, 부력, Hull 유체력, 제어 유체력과 관련이 있다[2][4].
운동성능 시뮬레이션은 기본적인 잠수정의 운항이 가능한가에 대해서 확인할 수 있도록 직진, 수평선회, 수평 지그재그 시험 등을 실시하였다. Figure 3은 추진기 추력은 40%, 수직타 각도는 0°로 설정하여 직진운항 시뮬레이션의 결과로서 x축으로 48m의 거리를 통과하는데 60초가 소요되었다. 추진기 추력의 40%일 때 0.8m/s의 속도로 직진하는 것을 확인할 수 있다. 선박이나 잠수함의 경우 프로펠러에 의한 모멘트에 의해서 한쪽 방향으로 치우치는 경향이 있지만, 본 시뮬레이션에서 적용한 추진기 식에서는 추진기 회전력에 의한 모멘트 성분을 적용하지 않아 y축으로 변위가 발생하지 않았다. Figure 4는 수평선회 성능을 나타내고 있다. 60초 동안 추진력은 40%, 수직타각은 30°를 유지하였으며 3.5m의 선회반경을 보였다. Figure 5는 -30°/+30° 수평지그재그에 대한 60초간의 시뮬레이션의 결과이며, 결과에서 살펴보는 바와 같이 수직타의 각도변화에 따라 지그재그 형태의 궤적을 보임을 알 수 있다.

Trajectory in horizontal plane (straight)

Trajectory in horizontal plane (turning)

Trajectory in horizontal plane (zigzag)
2.2 제어기 설계
만타형 잠수정의 제어 시뮬레이션은 기본적인 제어기인 PID제어기를 사용하였다. PID제어기는 제어시스템에서 가장 널리 쓰이는 제어방식이며 개발 단계에 있는 만타형 잠수정에 적용하기 알맞다고 판단하여 사용하였다[6][7].
수심제어기를 설계함에 있어 잠수정의 수심방향 속도가 느리다고 가정하여 미분제어 동작을 무시하고 오차에 대한 비례제어만을 적용하여 식 (2)와 같이 적용하였다. 이때 δs는 수평타의 각도, Kpz는 비례 게인, zd는 목표수심, z는 현재 수심을 나타낸다.

방향제어기는 식 (3)과 같이 PD제어기를 사용하였다. 이때 δr는 수직타 각도, kpψ과 kdr는 비례게인과 미분 게인, ψd는 목표 선수동요각, ψ는 실제 선수동요각, rd과r각각 ψd와 ψ의 미분항을 나타낸다.

시뮬레이션을 이용한 제어성능 시험은 운동성능 시험과 동일하게 Matlab/Simulink를 이용하였으며 동일한 6자유도 방정식에 식 (2)와 (3)의 제어식을 적용하였다. 또한 샘플링 주기는 0.01초로 시뮬레이션을 수행하였다. Figure 6은 Kpz게인 50으로 설정하고 목표수심은 0.5m로 설정하였을 때 결과를 보여주고 있다. 잠수정이 수심방향으로 오버슈트 없이 이동한 것을 알 수 있다.
방향제어 결과는 Figure 7과 같다. 0°에서 출발하여 목표 각도 30°를 유지하도록 설정하였으며 이 때 Kpψ와 Kdr는 각각 50과 30이며 60초간 시뮬레이션을 실시하였다. 결과에서 보는 바와 같이 약 30°의 각도를 유지하면서 잠수정이 이동함을 궤적을 통하여 알 수 있다.
최종적인 목표로서 자율 경로주행을 위한 경로주행 시뮬레이션을 확인하였다. 경로주행에서 목표방향각을 결정하기 위해 사용된 방식은 LOS (Line of Site)방식을 이용하였으며 수식은 식 (4)와 같다. Figure 8은 경로주행의 결과를 보여주고 있다.

Trajectory in vertical plane (depth)

Trajectory in horizontal plane

Navigation tracking simulation result of Trajectory in horizontal plane

식 (4)에서 ψd는 목표 방향각을 나타내며, Xk 와 Yk는 목표좌표, X(t), Y(t)는 현재좌표를 나타낸다. 수심 방향의 경우 독립적으로 수심제어를 이용하여 제어가 되도록 하였다.

식 (5)는 현재 목표경유점에 도착 여부를 결정하기 위한 조건이다. ρ(t)는 목표점에서 현재 좌표까지의 거리를 나타낸다. Xk, Yk, Zk는 3차원상의 목표위치이며, X(t), Y(t), Z(t)는 3차원 상의 현재위치를 나타낸다. 만타형 잠수정의 실해역 시험시 ρc의 설정은 잠수정의 위치 센서의 정밀도와 실험해역의 외란을 고려하여 10m 반경으로 설정하였다.
3. 만타형 무인 잠수정 설계
3.1 설계목표
만타형 무인잠수정의 개발 목적은 플랫피쉬 타입(Flatfish type)의 만타 형상을 가진 잠수정으로서 10m 이내의 수심에서 운동성능의 파악과 자율 주행성능 시험의 달성을 목표로 하였다. 이에 따라 수상 및 수중에서의 잠수정의 경로와 자세를 취득할 수 있는 센서를 탑재해야 하며 6자유도 운동방정식 모델과 같이 추진기로 추진하며 타를 이용하여 방향과 수심을 바꿀 수 있는 구조의 설계가 필요하다. 설계 및 제작된 무인잠수정의 제원은 Table 2와 같다.
Specification of Manta-UUV
3.2 기구 시스템
제작된 만타형 잠수정은 1.5 m(L) x 0.55m(B) x 0.28m(H) 사이즈로 FRP재질로 만들어져 있으며, 내부에 계측 및 구동 시스템을 적재하기 위한 알루미늄 6061 재질의 내압용기 2개로 구성되어있다. 전방 추진력을 얻기 위한 추진기는 350 watt급의 Tecnadyne사의 Model 300이 한 개 사용되었으며 수평방향과 수직방향의 운동이 가능하도록 ROBOTIS사의 Dynmixel EX-106+ 서보 모터를 이용하여 수평타 및 수직타를 구동한다. 수평방향으로 운항하기 위한 수직 타는 1개를 이용하였으며 수직방향 운항은 4개의 수평타가 동시에 같은 각으로 이동하여 운항하도록 되어 있다.
3.3 계측 및 제어 시스템
잠수정 경로의 계측과 제어를 위한 시스템의 구성으로 제어보드는 Zotec사의 Geforce 9400-ITX모델 On-board computer를 이용하였다. 압력센서의 아날로그 입력과 추진기 제어에 이용된 아날로그 신호의 입출력에는 NI사의 USB-6009보드를 이용하였으며, 경로 계측을 위한 센서는 DVL, GPS, Gyrocompass가 사용되었다. Computer와 RS-232 통신을 통해서 센서로부터의 정보가 실시간으로 수신하며 모터 또한 제어한다. Figure 9는 전체 시스템 구성에 대한 블록다이어그램을 나타내며, 만타형 무인잠수정은 육상의 Host PC로부터 초기 명령 값을 무선으로 전송 받는다. 이후에 잠수정은 제어기에 의해서 명령을 수행하게 된다. Table 3은 만타형 잠수정에 사용된 센서의 사양을 나타낸다.
전체 시스템의 샘플링 주기는 5Hz 속도로 센서 데이터를 계측하도록 하였다. 이는 실험 시 최대 0.7 m/s속도로 주행할 때 선회 반경이 4m 이고 5Hz의 샘플링 주기로 이동궤적을 분석하는데 충분함을 실험을 통해 확인하여 설정 하였다. Figure 10은 시스템의 구동을 위해 NI사의 Labview 8.6을 사용하여 프로그래밍 된 컨트롤 프로그램의 패널을 나타낸 그림이다. 만타 잠수정의 전원은 25.7V 6.6Ah 리튬폴리머 배터리 5팩을 사용하였으며 0.7m/s의 속도로 구동 시 4시간 가량 구동 가능하도록 설계되었다.

Block diagram for hardware system
Sensors of Manta-UUV

Control Program(Front Panel)
4. 실해역 성능 시험
운동성능과 자율운항 성능시험을 위한 실해역 시험 장소는 Figure 11의 한국해양대학교의 요트 선착장에서 진행되었다. 시뮬레이션과 동일한 조건에서 실험을 하기위해서는 수조에서 시험이 선행되어야 하지만, 여건상 실해역에서 바로 시험을 시행하였다. 또한 실험에서 조류의 영향과 잠수정 보호를 위해 설치한 로프의 장력에 대한 영향에 대해서는 고려하지 않은 실험 결과에 이용하였다.

Test site of Manta UUV
4.1 운동성능 시험
만타형 잠수정의 운동성능 파악을 위해서 직진, 선회, 지그재그 운동에 대한 시험을 실시하였다.
직진 성능은 Figure 12와 같이 수평타각을 0°로 유지하여 0.4m/s의 속도로 진행시켰을 때의 결과를 보이며 시뮬레이션 결과에 비교하면, 한 개의 추진기를 이용하여 진행하기 때문에 프로펠러의 회전의 영향으로 인하여 잠수정이 오른쪽으로 치우치는 경향이 발생하였으며, 또한 조류의 영향으로 인하여 총 이동거리가 1.5m 가량 적게 나타났다.

Experiment result for straight motion
Figure 13은 수직타각을 30°로 한 선회시운동의 모습이며 3.7m의 선회 반경을 보였다. Figure 14는 30°/30°지그재그 운동의 결과이며 시뮬레이션에 비하여 상당히 적은 거리를 이동하는 결과를 보였다. 지그재그 운동시 좌우 측면이 조류의 영향을 받게 되고 이는 조류에 의한 항력에 의하여 진행방향에 대한 이동거리가 점점 줄어든 경우라고 보인다. 0°에서 30°로 방향을 전환하는데 3초가량의 시간이 소요되었다.

Experiment result for horizontal turning

Experiment result for horizontal zigzag
4.2 자율운항 성능시험
본 연구의 최종 목표인 자율운항 성능 시험을 위해서 수심제어와 방향제어에 대한 시험을 실시하였으며, 각각의 제어기는 식 (2)와 (3)의 제어기를 이용하였다. 본 논문에서는 실험적으로 제어 게인을 구하여 자율운항 성능시험에 적용하였다.
Figure 15는 목표각을 45°로 하여 비례제어 게인 Kpψ을 114.59 미분제어 게인 Kdr을 1.145로 설정하였을 때의 결과를 보인다. 조류의 영향으로 드리프트 되었지만 목표 방향각을 잘 추종하는 것을 확인 할 수 있었다. Figure 16은 이때 제어된 수직타의 각과 실제 선수동요각을 나타낸다.
수심제어 실험은 목표수심을 0.5m로 설정하였으며 이때 수직타각은 0°로 고정하였고 비례게인 Kpz을 20으로 설정하여 실험 하였다. Figure 17은 수심제어 결과이며 목표 수심에 도달하는 시간은 7초정도 소요되었다. Figure 18은 수심제어시 3차원 경로를 나타낸다. 경로주행 성능시험은 식 (4)의 가시선 방법을 이용하여 실시하였다. 시작 좌표를P0(0, 0)m로 설정하여 네 개의 포인트 P1(-30, 50), P2(10, 50), P3(20, 20)m, P0(0, 0)m를 통과하도록 설정하였다. 이 때 목표좌표 반경의 크기를 10m로 설정하였으며 추진기의 추진력은 80%로 설정하였다. Figure 19는 자율운항 경로를 나타내고 있다. P0(0, 0)m포인트에서 출발하여 10초간 GPS 신호가 원활하게 계측되지 못하였으나 이후 경로주행에는 목표반경을 잘 운항하는 결과를 보였다. Figure 20은 목표방향각, 선수동요각과 수직타각의 변화를 보이고 있다. 현재 자율경로 주행은 목표 좌표반경이 상당히 크며 외력에 의해서 실험에 큰 영향을 받는 경향을 보이고 있다. 이를 해결하기 위해서는 외란에 강인한 제어기의 적용과 잠수정의 추진력을 더 높여 조류의 영향을 이겨내도록 하는 연구가 필요하다.

Experiment result of heading control

Heading angle and rudder angle

Experiment result of depth control

Trajectory in 3D(depth control)

Experiment result for navigation control

Heading and rudder angle (navigation)
5. 결 론
본 논문에서는 만타형 무인잠수정의 운동성능 해석을 바탕으로 하드웨어 제작과정과 내부 시스템의 구성 그리고 운동성능 및 자율운항을 위한 시험에 대해 기술하였다.
만타형 무인잠수정의 개발 목표는 만타형상의 잠수정이 제어 가능한 운동성능을 가지며 원하는 위치로 기동을 할 수 있도록 하는 것이다. 이를 위해서 시뮬레이션을 기반으로 개발된 형상에 대해 실험을 통해서 운동성능을 검증을 하였다. 또한 PD제어기를 적용하여 수평방향 및 수직 방향에 대한 제어계수를 보정하여 최종 목표인 자율운항 성능 시험을 성공할 수 있었다. 향후 실험에서는 더욱 향상된 제어기를 탑재하여 척박한 해역에서도 외란을 견뎌낼 수 있는 시스템 구축에 대한 연구가 진행될 것이다.
Acknowledgments
본 연구는 2011년 한국해양대학교 신진교수정착연구비 지원에 의해 이루어진 결과임.
References
- Joo-No Seo, and Joong-Lak Choi, “Trend and advancement of autonomous technology on autonomous underwater vehicle”, The institute of Electronics Engineers of Korea, 38(7), p516-525, (2011), (in Korean).
-
Jun-Young Bae, Kyoung-Ho Sohn, and June Kim, “A study on mathematical model of manoeuvring motion of manta-type unmanned undersea vehicle at large attack angles”, Journal of the Society of Naval Architects of Korea, 47(3), p328-341, (2010), (in Korean).
[https://doi.org/10.3744/SNAK.2010.47.3.328]

- Thor I. Fossen, Guidance and Control of Ocean Vehicles, John Willey & Sons, (1994).
- Abkowitz, Martin A., “Stability and motion control of ocean vehicles”, The MIT Press, Cambridge, (1969).
-
Hyeong-Dong Kim, A Study of the Conrol System for the Manta-type UUV, M.S. Dissertation, Department of Naval Architecture and Ocean Engineering, Pusan National University, (2011), (in Korean).
[https://doi.org/10.5394/KINPR.2011.35.5.359]
- Joon-Young Kim, “Design and control of a hovering type AUV”, Journal of the Korean Society for Precision Engineering, 26(5), p23-32, (2009).
- Bong Huan Jun, Jin Yeong Park, Pan Mook Lee, Fill Youb Lee, and Jun Ho Oh, “Development and tank test of an autonomous underwater vehicle 'ISiMI'”, Journal of Ocean Engineering and Technology, (2007), 21(2), p67-74.
- Sung-Hyub Ko, A Study on Autonomous Navigation Experimental Test for Manta-type Unmanned Underwater Vehicle, M.S. Dissertation, Department of Ocean System Engineering, Jeju National University, (2012), (in Korean).








