
Fuzzy-based adaptive controller for nonlinear systems
This paper investigates the design scheme of fuzzy-based adaptive controller to give adaptability for controlling nonlinear systems. For this, a nonlinear system is linearized by the several subsystems depending on the operating point or parameter changes. Then, the sub-controller is designed by linear control scheme for each subsystem and the sub-controllers are fused with each gain of sub-controllers using fuzzy rules. The proposed method is applied to an inverted pole system which has structurally instability and nonlinearity, and simulation works are shown to illustrate the effectiveness by comparison with the interpolation-based adaptive Controller.
초록
본 논문에서는 비선형 시스템의 제어를 위해 제어기에 적응성을 부여하는 퍼지 기반 적응제어 기법에 대해 다룬다. 이를 위해 우선 비선형 시스템을 작동점 또는 파라미터 변화에 따라 여러 개의 서브시스템으로 선형화 한다. 다음으로 각 서브시스템에 대해 선형제어 기법으로 서브제어기를 설계하고, 이 서브제어기 이득을 퍼지규칙을 이용하여 융합한다. 제안한 기법을 비선형 시스템이면서 구조적으로 불안정한 도립막대 시스템에 적용하여 시뮬레이션을 실시하고, 기존의 보간 기반의 적응 제어기법과 성능을 비교하여 그 유효성을 확인한다.
Keywords:
Subsystem, Sub-controller, Fuzzy-based adaptive controller, Nonlinear inverted pole system, 서브시스템, 서브제어기, 퍼지 기반 적응제어기, 비선형 도립막대 시스템1. 서 론
비선형 시스템을 제어하는 일반적인 방법은 해당 시스템이 가장 많이 동작되는 평형점(Operating point) 부근에서 선형화 한 후, PID 제어기나 LQ 제어기와 같은 선형제어기를 설계하여 제어하는 것이다. 그러나 이러한 선형제어기는 제한된 제어환경 내에서는 우수한 제어성능을 발휘하지만, 제어환경 변화로 인한 파라미터의 변동이 존재하는 경우에는 강인성을 보장할 수 없고, 만족스러운 제어성능을 얻지 못하는 결점을 가지고 있다. 이러한 문제점을 해결하기 위하여 현재까지 많이 응용되어 온 기준모델적응제어(Model reference adaptive control; MRAC)와 자기조정제어(Self-tuning control) 등도 시스템의 결정적 성질에 의존하므로 제한된 제어환경에서만 성공적으로 작동하는 한계를 가지고 있다[1][2]. 이에 대한 하나의 대안으로 이[3]등은 비선형 시스템을 여러 개의 서브시스템으로 선형화하고, 각 서브시스템에 대해 서브제어기를 설계한 후 보간법을 이용해 융합하는 보간 기반 적응제어기를 제안하였다. 이를 통해 시스템의 파라미터 변화에 잘 대응하지 못하는 선형제어기의 단점을 보완하는 방법을 보였다.
한편, 퍼지제어는 불확실한 정보를 다룰 수 있고, 전문가의 지식을 직접 언어규칙으로 표현할 수 있으며, 제어대상의 수학적 모델을 요구하지 않는 장점 때문에 복잡하고 불확실한 시스템의 제어에 많이 이용되어 왔다[4][5]. 특히, T-S(Tagaki-Sugeno) 퍼지모델[6]과 병렬분산보상(parallel distributed compensation : PDC) 개념[7]을 이용한 비선형 시스템의 제어는 안정도 분석과 체계적인 설계방법이 가능해 많이 사용되고 있다.
따라서 본 논문에서는 제어환경의 변화에 대해 제어기에 적응성능을 부여하기 위한 또 하나의 방법으로 퍼지 기반 적응 제어기 설계기법을 제안한다. 이 방법은 비선형 시스템을 파라미터 변화에 따라 여러 개의 서브시스템으로 선형화 한 후, 서브제어기를 설계하고, PDC 개념을 이용하여 서브제어기를 다시 퍼지결합하는 방법이다.
제안한 제어기 설계 기법을 비선형 시스템이면서 구조적으로 불안정한 도립막대 시스템에 적용하여 시뮬레이션을 실시하고, 이를 기존의 선형 및 보간 기반 제어기와 비교함으로써 제어기의 유효성을 살펴본다.
2. 비선형 도립막대 시스템
2.1 대차와 도립막대
본 논문에서 다루는 비선형 시스템은 Figure 1과 같은 도립막대 시스템이다.

Inverted pendulum system
그림에서 대차의 수평방향 위치를 z[m], 대차의 수평방향 속도를
 [m/s],막대의 수직에 대한 각도를 θ[rad], 각속도를
[m/s],막대의 수직에 대한 각도를 θ[rad], 각속도를
 [rad/s]라 정의하고, 라그랑지(Lagrange) 운동방정식을 이용하면 다음과 같은 비선형 운동방정식을 얻을 수 있다.
[rad/s]라 정의하고, 라그랑지(Lagrange) 운동방정식을 이용하면 다음과 같은 비선형 운동방정식을 얻을 수 있다.
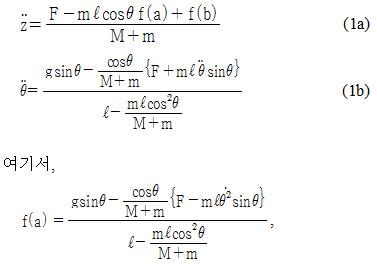
 이고, M과 m은 각각 대차와 막대의 질량, 2l은 막대의 전체 길이를 의미한다.
이고, M과 m은 각각 대차와 막대의 질량, 2l은 막대의 전체 길이를 의미한다.
2.2 대차 구동부
조금 더 실제적인 운동방정식을 구현하기 위해 위의 운동 방정식에서 대차에 가해지는 힘 F[N]와 구동 모터에 인가되는 전압 u[V]의 관계를 다음과 같이 구한다.

여기서 Kg는 기어박스의 기어비, rd는 구동모터 피니언의 회전반경, Km은 모터의 토크상수, Ra는 모터 회전자 저항을 의미한다. 이때 포화 구동 전압 usat는 구동 모터의 사양을 고려하여 ±20[V]로 가정한다.
한편, 시스템의 상태변수
 으로 정의하고, 도립막대 시스템에 사용되는 파라미터는 Table 1과 같다.
으로 정의하고, 도립막대 시스템에 사용되는 파라미터는 Table 1과 같다.

The value of system parameters
2.3 서브시스템
본 논문에서는 비선형 도립막대 시스템의 막대 길이 l만 변화하고, 나머지 파라미터는 일정한 것으로 가정하여 제안한 제어기의 유효성을 살펴보기로 한다.
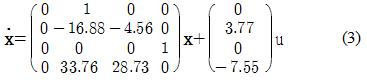
막대 길이 l이 1.0[m]인 경우를 공칭모델로 가정하고, 0.5[m], 1.5[m]로 파라미터가 감소 또는 증가하는 경우를 고려한다. 이때 Table 1의 파라미터 값을 참고하면 식 (1)과 식 (2)의 비선형 시스템은 다음과 같은 3가지의 서브시스템으로 표현된다[3].
서브시스템 1 : l=0.5인 경우(파라미터 감소)
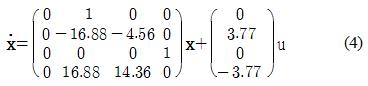
서브시스템 2 : l=1.0인 경우(공칭모델)
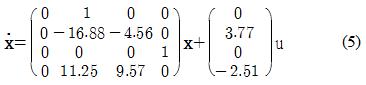
서브시스템 3 : l=1.5인 경우(파라미터 증가)
3. 제어기 설계
2.1 LQ 제어기
식 (3), (4) 및 (5)에 주어진 서브시스템 1~3에 대하여 LQ 제어기를 설계하기 위해 시행착오를 통해 우수한 응답을 보이는 양의 반한정행렬 Qi와 Ri (i=1,2,3)를 다음과 같이 선정한다.
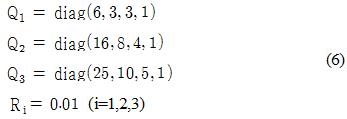
이를 통해 식 (3)~식 (5)의 서브시스템에 대한 서브제어기의 이득 Ki (i=1,2,3)를 구하면 다음과 같다.
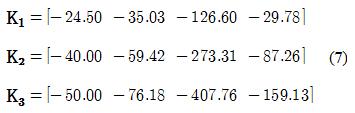
최종적으로 사용되는 제어법칙은 ui = - Kix을 변형하여 도립막대 대차의 추종제어가 가능하도록 다음과 같은 형태의 제어입력을 사용한다.

여기서 j는 상태변수의 개수를 의미한다.
2.2 퍼지 기반 적응 제어기
퍼지 로직은 제어 관점에서는 복수개의 “If-then” 형식으로 나타나는 서브제어기를 병렬로 퍼지추론하여 복잡한 입·출력 관계를 실현하는 것이 가능하므로 파라미터 변화에 대해 적응성을 부여하는 것이 가능하다.
본 논문에서 다루는 퍼지 기반 적응 제어기는 Takagi-Sugeno의 추론법을 응용하여 다음과 같이 추론한다.
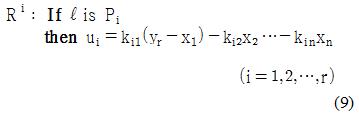
여기서, Ri는 i번째 제어규칙, r은 규칙의 개수로 3이고, ui는 서브제어기 출력, kij(i=1,2,3;j=1,2,3,4)는 j번째 상태 변수에 대한 i번째 서브제어기의 이득이다.
또한 Pi(i=1,2,3)는 전건부의 퍼지집합으로 식 (10)과 같은 시그모이드 및 가우시안형을 사용하였으며 P1은 SM(Small), P2는 MD (Medium), P3는 LG(Large)를 의미한다.
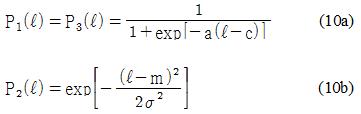
Figure 3은 식 (10)을 이용하여 l의 변화에 따른 전건부의 퍼지 소속함수를 나타낸 것이다.

Membership function
그러면 최종적으로 퍼지 기반 적응 제어기의 출력 uf는 다음과 같이 추론된다.
여기서, ρi는 i번째 소속함수의 기여도이다.
4. 시뮬레이션
제안한 제어기의 성능 확인하기 위해 사용되는 도립막대 시스템은 식 (1)과 식 (2)의 비선형 시스템이다.
우선, 파라미터 변화(모델링의 불확실성)에 대한 적응성을 시뮬레이션 하기 위해 파라미터 l이 공칭모델인 길이 1.0[m]에서 +60% 증가(1.6[m])한 경우를 가정한다. Figure 4는 퍼지 기반 적응 제어기(FAC), 비교목적으로 기존에 연구[3]된 보간 기반 적응 제어기(IAC)와 l=1.0(가운데 길이)에서 설계된 LQ 제어기(LQC)의 응답을 나타낸 것이다.

Responses using the FAC(black color), IAC(red color), LQC(dotted) in the case of l=1.6[m]
Table 2는 각 방법의 성능을 정량적으로 비교하기 위해 6[s]까지 대차의 오버슈트(Mp), 도달시간(tr), 2% 정정시간(ts), 막대 각도의 IAE를 계산한 결과이다. 이때 tr= t90—t10이고, t10과 t90은 각각 출력이 설정치의 10%와 90%에 도달하는데 걸리는 시간을,
 를 의미한다. 표에서 보면 막대의 길이가 길어진 경우 FAC는 IAC와 거의 동일한 성능을 보인다. 특히 LQC는 파라미터 변화에 적응하지 못하고, 제어입력의 포화로 인해 심하게 헌팅하고 있다.
를 의미한다. 표에서 보면 막대의 길이가 길어진 경우 FAC는 IAC와 거의 동일한 성능을 보인다. 특히 LQC는 파라미터 변화에 적응하지 못하고, 제어입력의 포화로 인해 심하게 헌팅하고 있다.
Control performances in the case of l=1.6[m]
이제, 공칭모델(l이 1.0[m])에서 파라미터가 -60% 감소(0.4[m])한 경우를 가정한다. Figure 5에서 확인할 수 있듯이 FAC는 막대 길이가 짧아져 제어환경이 열악한 경우에도 강인한 제어성능을 보이고 있다. 이 경우에도 정량적 성능을 비교하기 위해 Table 2와 동일한 방법으로 제어성능을 구해 나타낸 것이 Table 3이며, 표를 통해 확인할 수 있듯이 FAC와 IAC는 거의 동일한 결과를 보이며, LQC는 제어입력 포화로 인해 심한 헌팅을 보이며 대차의 위치를 추종시키지 못하고 있다.
다음으로 공칭모델에서 파라미터 l이 범위 [0.5 1.5] 사이에서 l = 0.3sin(2t) + 0.3sin(1.5t) + 0.97와 같이 실시간으로 변화하는 상황에서 외란이 동시에 인가되는 경우의 제어성능을 살펴본다.

Responses using the FAC(black color), IAC(red color), LQC(dotted) in the case of l=0.4[m]
Control performances in the case of l=0.4[m]
주어지는 외란은 각도 외란으로 가정하여 1[s] 시점에서 –0.1[rad], 7[s] 시점에서 +0.1[rad]을 인가하였고, 16[s] 시점과 22[s] 시점에서는 조금 더 큰 외란인 –0.2[rad]과 +0.2[rad]을 각각 인가하였다.
Figure 6는 이에 대한 응답 결과를 나타낸 것이고, Table 4는 15[s]까지의 대차에 대한 오버슈트(Mp), 도달시간(tr), 2% 정정시간(ts), 30[s]까지의 막대의 각도에 대한 IAE를 계산한 결과이며 각 방법의 외란 억제 성능을 정량적으로 계량하기 위하여 네 번의 외란을 인가할 때마다 응답의 피크치(Perturbance peak) Mpeak와 외란의 영향이 소멸되는데 걸리는 회복시간(Recovery time) trcy을 동시에 구하였다. 이때 Mpeak는 |max(x3)—x3s| 또는 |min(x3)—x3s|를 의미하고(x3s는 막대의 각도가 0인 상태), trcy는 x3가 x3s의 2% 이내로 회복되는데 걸리는 시간을 의미한다. 이 경우에도 Table 4와 Figure 6을 통해 확인할 수 있듯이 FAC와 IAC는 약간 차이는 나지만 거의 동일한 결과를 보인다.마지막으로 Figure 6과 동일한 파라미터 변화 조건에 N(0, 0.012)의 백색잡음(white gaussian noise)이 인가되는 경우를 살펴본다. 이때 백색 잡음은 실제 실험장치의 계측을 고려하여 대차의 위치와 막대의 각도 두 곳에 동시에 추가하였으며 Figure 7은 이에 대한 응답 결과를 나타낸 것이다.

Responses using the FAC(black color), IAC(red color) in circumstances of parameter change and disturbance
Control performances in circumstances of parameter change and disturbance

Responses using the FAC(black color), IAC(red color) in circumstances of parameter change and white gaussian noise
Table 5는 두 방법의 성능을 정량적으로 비교하기 위해 30[s]까지 대차와 막대 각도의 IAE를 계산한 결과이다.
Control performances in circumstances of parameter change and white gaussian noise
그림과 표를 통해 알 수 있듯이 FAC는 파라미터가 실시간으로 변화하고, 잡음이 주어지는 열악한 제어환경에서도 강인한 제어성능을 보이고 있다. 특히, 이 경우에는 대차의 추종 및 각도 유지 성능 면에서 FAC가 기존의 IAC 보다 우수한 결과를 보이고 있음을 확인할 수 있다.
5. 결 론
본 논문에서는 비선형 시스템의 제어를 위한 퍼지 기반 적응 제어기법을 제안하였다. 제안한 기법은 비선형 시스템을 파라미터 변화에 따라 다수 개의 선형 서브시스템으로 표현하고, 이 서브시스템에 대해 설계된 서브제어기를 퍼지규칙을 이용하여 융합한 제어기이다. 이렇게 서브제어기를 퍼지기법으로 결합함으로써 퍼지제어의 큰 장점인 강인성과 적응성을 가질 수 있게 된다.
제안한 기법은 비선형 도립막대 시스템에 적용하고, 기존의 제어기와 비교하여 시뮬레이션을 실시한 결과 다양한 형태의 파라미터 변화, 외란의 인가, 계측잡음을 고려한 제어환경에 대해 기존의 선형 및 적응 제어기보다 적응성과 강인성이 뛰어남을 확인할 수 있었다.
References
- R. E. Skelton, Dynamic Systems Control, John Wiley & Sons, (1988).
- M. Drouin, H. H. Kandil, and M. Marition, Control of Complex System, Plenum Press, (1991).
-
Y. H. Lee, J. K. Ahn, G. G. Jin, and M. O. So, “Interpolation-based adaptive LQ control for nonlinear systems,”, Journal of the Korean Society of Marine Engineering, 32(4), p618-623, (2008), (in Korean).
[https://doi.org/10.5916/jkosme.2008.32.4.618]

- S. Tong, T. Wangn, and J. T. Tang, “Fuzzy adaptive output tracking control of nonlinear systems”, Fuzzy Sets and Systems, 111(2), p169-182, (2000).
-
I. Rojas, H. Pomares, J. Gonzalez, L. J. Herrera, A. Guillen, F. Rojas, and O. Valenzuela, “Adaptive fuzzy controller: Application to the control of the temperature of a dynamic room in real time”, Fuzzy Sets and Systems, 157(16), p2241-2258, (2006).
[https://doi.org/10.1016/j.fss.2006.03.006]
-
T. Takagi, and M. Sugeno, “Fuzzy identification of systems and its application to modeling and control”, IEEE Transactions on Systems, Man and Cybernetics, 15(1), p116-132, (1985).
[https://doi.org/10.1109/TSMC.1985.6313399]
-
K. Tanaka, and M. Sano, “A robust stabilization problem of fuzzy control systems and its application to backing up control of a truck-trailer”, IEEE Transactions on Fuzzy Systems, 2(2), p119-134, (1994).
[https://doi.org/10.1109/91.277961]