Merits of all-electric subsea production control system
Recently, researches on all-electric subsea system have been in progress. This paper describes a subsea tree using a lot of electrical signal and subsea control system. The way of subsea control is classified as all-electric systems or electro hydraulic systems. One of that has more merits in terms of cost, weight, power consumption, etc. because it uses electric signal instead of hydraulic signal. This paper describes the difference of each system’s power consumption and simulation. As the result, if each system applies the same number of sensors, actuators, etc. The power consumption of all-electric system’s load is less than at least 400kWh/day compared to the electro hydraulic system load.
Keywords:
All-electric subsea system, Electric subsea tree, All-electric subsea production control systemNomenclature
AE – all-electric
CVA – Choke Valve Actuator
DCV – Directional Control Valve
EPU – Electrical Power Unit
ESCM – Electrical Subsea Control Module
EH – Electro Hydraulic
HPU – Hydraulic Power Unit
MCS – Master Control System
PT – Pressure Transmitters
SCM – Subsea Control Module
SCSSV – Surface Controlled Subsurface Safety valve.
SEM – Subsea Electrics Module
SS – Subsea Structures
SVA – Single Valve Actuator
SVNO – Single Valve Normal Operation
VA - Valve Actuation
1. Introduction
These days, offshore plant is using electro-hydraulic subsea control systems from offshore reserves in many areas of the world.
Also, it has been developing the fixed platform jacketed structures to produce from greater water depths and longer distances's field from shore.
In the sea, there are many different ways to design offshore production facilities which are connected to the host facility via umbilical and flow-line systems. Each of the hydraulic valves was individually controlled by a direct hydraulic connection back to the host facility and topside control panel. The panel is consisted of hydraulic pumps, motors, valves and accumulators. The hydraulic system has slow response speed for host actuator in subsea production control system. In addition, the size and weight of connecting umbilical hoses has to be reduced for the simplicity of systems. The importance of these requirements are increasing together for a reliable concept, simplicity and relatively low cost.
Also, a demand for improving reliability and controllability will increase the opportunity to use all-electric subsea control system. all-electric system technology consists of electric actuation with actual, real-time position reading, feedback and power transmission by the communication signal with including command. All-electric subsea production control system needs new technology which is not covered by relevant industry standards. Especially, studies regarding all-electric production control system’s components such as EPCDU and ESCM, etc. continue in Cameron. Also, all-electric subsea production is tested following test tree system to define AE System’s characters. Therefore this paper delineates merits of all-electric production control system and difference between traditional system.
2. Subsea Production Control System
The subsea production control system can be divided into several sections such as surface equipment, umbilical and terminations, and subsea equipment. Generally, the control system belongs to an integrated system which works remotely. The control system includes functions as follow;
• opening and closing valves and subsea tree production, SCSSV
• opening and closing manifold flow line, pigging and chemical injection valves
• adjusting opening angle(for choke, etc)
• monitoring temperature, pressure, flow rate, voltage, etc
The system consists of an electric control system and a communication system for one or more subsea systems to supply power through connected power cable and fiber cable.
The electric power is supplied to subsea equipments such as valves, electrical actuators, transducers, sensors, pumps, motors, control system, etc.
The electric power supply for a subsea production system is designed according to the subsea control system. Figure 1 shows Subsea Control System Overview.

Subsea control system overview
Generally, subsea tree is an electro hydraulic subsea system. It is installed at the wellhead to ensure that security obstacle in pipe is necessary. Also, it provides a controllable interface between the well and production facilities.
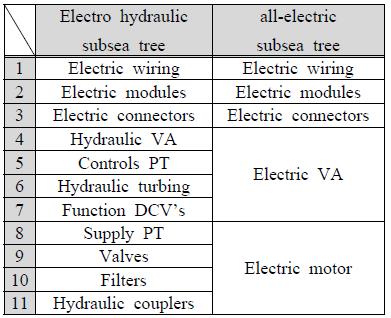
Table 1 defines EH and AE system organizing equipment. Part of the bolding indicator in table is a common equipment for each systems. Figure 2 (a) is a picture of AE subsea tree system configuration and (b) is a picture of EH subsea tree system configuration.

Each system equipment

Subsea tree
3. Each Subsea Control System
3.1 Electro hydraulic subsea control system
Nowadays, most of subsea systems use a multi-plexed electro-hydraulic subsea production control system. It is composed of subsea communication system, some series of hydraulic control valve, etc. MCS is performed by a computer and SEM. SCM of EH system has many connections such as same communications, electrical, and hydraulic supply lines. Also, EH system has some features such as the great amount of supplying quantity of data feedback and a good response time over long distances. And, the diameter of its connection cable is small. The system can control many valves and well via a single cable. Also, there is no operational limitation. But the system has a lot of surface and subsea components needed for recharging the hydraulic supply because of the long distances between equipments. In addition it has limitations for long distance tie-backs. Figure 3 shows the configuration electro hydraulic system.

Electro hydraulic system
3.2 all-electric subsea control system
The development of electrical valve actuation has been the subject of several research programmes. Subsea control system for offshore plant has been a interesting concept of an all-electric subsea production control system for many years. One of the main feature for the all-electrical control system is to replace hydraulic power with electric power as the power source in subsea system. The other main feature is that the operation of electric motors in the valve actuators is performed by locally stored power in rechargeable batteries and capacitors. This system is selected due to several merits as follows;
• Reducing power consumption by mechanical operation
• No need for high power cable and connectors from the surface
• Cost saving due to removing hydraulic and mechanical actuators
Figure 4 is AE systems configuration.

All-electric system
3.3 Comparison of subsea tree power
Generally, there are three load groups as vital, essential, nonessential. And each group can be divided into continuous duty, intermittent duty and standby duty. The total load in offshore plant can be defined as follows; the total running load as TRL and the total peak load as TPl.
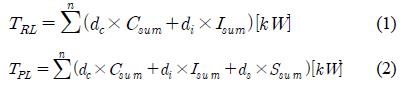
For the equations above, n is the number of switchboards, Csum is the sum of continuous duty, Isum is the sum of intermittent duty, Ssum is the sum of standby duty, dc(1.0~1.1) is the diversity factor for Csum, di(0.0~0.2) is the diversity factor for Isum, and ds(0.3~0.5) : diversity factor for Ssum.
The continuous loads are associated with power consumption that remains constant during the life time of the system regardless of the operation taking place at any time.
Intermittent loads are considered the loads that depend on the operational status of the system.
The momentary load is essential to identify the duration and frequency of operations as well as a statistical description of operation occurrences in a specified time period.
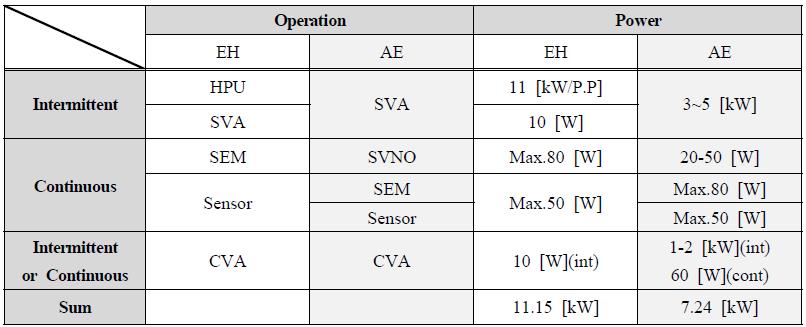
Table 2 shows typical values for continuous and intermittent loads during the operation of electro-hydraulic and all-electric production systems, respectively.
Loads for subsea tree operation
4 Simulation
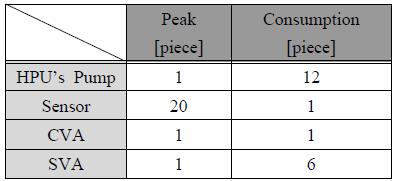
The simulation of this paper shows power consumption per day and difference of peak power between EH System and AE System. Simulation regarding peak load and Power consumption per day assumes the quantity of changeable equipment as follows.
Simulation environment

Power consumption per day simulation panel
4.1 Each System’s Peak Load
The difference between EH and AE is determined by availability of HPU. Figure 6 shows the peak load of electro hydraulic system.

EH system peak load simulation panel
The load of EH System can be changed according to quantity of sensor, valve, pump driven by a hydraulic, etc.
The peak load change of AE System is determined by intermittent load such as SVA, CVA and etc,
Especially, fluctuation of SVA is the main cause of change. In spite of fluctuation in SVA, AE systems have a lower load than EH systems because AE systems do not have HPU.
Figure 7 shows the peak load of AE system. The range varies from about 1,190[W] to 8,190[W].

AE control situation
Figure 8 shows peak load comparison of each system.

Comparison of peak load
4.2 Each System’s Power consumption
Figure 9 shows the average of EH system’s power consumption per day level. The result value of simulation can change due to operating environment of subsea systems and characteristic of devices. Especially, simulation of EH system’s power consumption per day level can change due to HPU Power.

Power consumption average value of EH system (1 year)
Figure 10 shows the average of AE system’s power consumption per day level.

Power consumption average value of AE system (1 year)
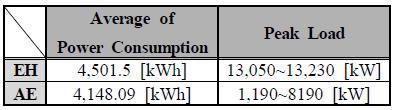
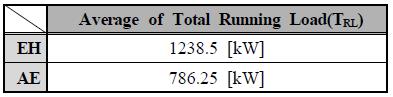
Simulation result (1)
Simulation result (2)
5. Conclusions
For an approach to deeper water oil field, each system has to improve the stability, reduce cost, increase reliability. Comparing to EH systems including hydraulics control system, AE systems have several merits for the approach. Most of subsea control systems are still made up EH systems. However, if subsea production control system applies AE system, TRL and average of power consumption can be reduced about 450[kW], 400[kWh] than existing EH system. Also, the value range of peak load also can be considerably reduced from the range of 13,050 to 13,230[kW] which is the peak load value of EH system to the range of 1,190 to 8,190[kW] which is the peak load value of AE system.
Acknowledgments
This work is the outcome of a Manpower Development Program for Marine Energy by the Ministry of Oceans and Fisheries.
References
- Yong. Bai, and Qiang. Bai, SUBSEA ENGINEERING HAND BOOK, ELSEVIER, (2010).
- Anders Husby and Rhodri Morgan, Universitetet I Oslo, http://www.uio.no/studier/emner/matnat/math/MEK4450/h11/undervisningsmateriale/modul-2/3%20Production%20Control%20Systems.pdf, Accessed , 30 May, (2013).
-
M. Theobald, and C. Lindsey-Curran, “Benefits of All-electric subsea production control systems”, Offshore Technology Conference, OTC 17106, (2005).
[https://doi.org/10.4043/17106-MS]

- U Kyaw Naing, Scribd, http://www.scribd.com/doc/52667755/L08-SUBSEA-CONTROL-SYSTEMS, Accessed , 30 May, 2013.
- U Kyaw Naing, Scribd, http://www.scribd.com/doc/52667577/L04-CHRISTMAS-TREES, Accessed , 30 May, 2013.
- Mike Theobald and Sunbury, Society for Underwater Technology, http://www.sut.org.uk/pdf/SUT%20Lecture%20Trials_ppt.pdf, Accessed , 30 May, 2013.
- Vidar. Sten-Halvorsen, and Evind. Koren, “all-electric subsea tree system”, Offshore Technology Conference, OTC 19547, (2008).
-
Shiwu. Xiao, Tang. Wei, Kang. Xiaojuan, and Peng. Ying, “Design of Sub-sea long distance electric power supply system”, Electric Utility Deregulation and Restructuring and Power Technologies(DRPT), p1760-1763, (2011).
[https://doi.org/10.1109/DRPT.2011.5994183]
-
Michael. Stavropoulos, Barry. Shepheard, Mark. Dixon, and Daniel. Jackson, “Subsea electrical power generation for localised subsea applications”, Offshore Technology Conference, OTC 15366, (2003).
[https://doi.org/10.4043/15366-MS]
-
Laurent. Bouquier, Jean Pierre. Signoret, and Robert. Lopez, “First application of the All-electric subsea production system-implementation of a new technology”, Offshore Technology Conference, OTC 18819, (2007).
[https://doi.org/10.4043/18819-MS]
- R. Lopez, “Field trails of an All-electric subsea completion system”, Offshore Technology Conference, OTC 17392, (2005).
- Groupment des Entreprises et des Professinnels des Hydracarbures et des Energies connexes, http://www.aftp.net/_upload/ressources/jap_2011/atelier_5/presentations/came ron_-_jah_2011-_jan_van_den_akker_final_rev_2.pdf, Accessed , 30 December, 2013.