밸러스트 흘수 조건에서 5만톤급 석유화학제품 운반선의 엔진 부하에 따른 프로펠러 편심 추력이 축 거동 및 지지베어링에 미치는 영향 연구

Copyright © The Korean Society of Marine Engineering
This is an Open Access article distributed under the terms of the Creative Commons Attribution Non-Commercial License (http://creativecommons.org/licenses/by-nc/3.0), which permits unrestricted non-commercial use, distribution, and reproduction in any medium, provided the original work is properly cited.
초록
선박 축계는 프로펠러 중량의 영향으로 선미관 후부베어링의 국부적인 지지하중 증가가 현격하게 나타나므로 이러한 국부하중의 크기와 분포를 완화시키기 위하여 수행된 일련의 추진축계 정렬연구는 주로 준정적 상태(quasi-static condition)에서 프로펠러축과 선미관 후부베어링간의 상대적 경사각을 감소시키는데 중점을 두어 진행되어 왔다. 그러나 준정적 상태에서 계산된 선박들 중에서 여전히 선미관 베어링 사고가 발생하고 있다. 따라서 보다 완전한 축계 안정성 평가를 위해서는 동적상태에 대한 고려가 필요하다. 상기와 같은 배경에 의해 수행된 본 연구를 통해 엔진부하 증가에 따라 비례적으로 증가하는 프로펠러 편심추력은 5만톤급 석유화학제품 운반선의 축 거동에 영향을 미치는 주요 인자임을 확인하였다. 또한 베어링 정렬불량, 공진으로 인한 손상을 방지하기 위해 중간축 베어링의 지지특성을 추가적으로 고려해야 할 필요가 있음을 확인하였다.
Abstract
Generally, the propeller weight contributes significantly to the ship's shafting system, and it has a substantial impact on the local support load of the after-stern tube bearing. Therefore, a series of studies on shaft alignment have been conducted to mitigate the magnitude and distribution of localized loads, focusing on reducing the relative inclination angle between the propeller shaft and the after-stern tube bearing under quasi-static conditions. However, some of the vessel shafts calculated in quasi-static conditions still incur damage at the after-stern tube bearing. Therefore, consideration of the dynamic state is needed for a more complete stability evaluation of the shafting system. Through this study, conducted considering the above background, research results revealed that propeller eccentric thrust force, which increases proportionally with engine load, is a major factor affecting shaft behavior of 50,000 deadweight class oil/chemical tankers. Furthermore, it was confirmed that the bearing support characteristics of the intermediate shaft bearings, which were not considered in the conventional shaft alignment, need to be further analyzed, in order to prevent damage due to misalignment and resonance.
Keywords:
Oil/chemical tanker, Eccentric propeller forces, Shaft behavior, Stability evaluation of shafting system키워드:
석유화학제품 운반선, 프로펠러 편심추력, 축 거동, 축계 안정성 평가1. 서 론
축계정렬에 관한 연구는 1950년대 후반 미국 해군에서 그 중요성이 대두[1]된 이래 1970년대에 걸쳐 축계 베어링의 최적 위치를 결정하는 연구들이 수행되었다. 1961년의 연구[2]에서는 축계를 지지하는 지지베어링의 적절한 간격이 축계의 안정성을 높이는 중요한 인자임을 보여주었다. 이후, 기존의 직선배치법에 따라 축계정렬을 시행할 경우 지지베어링의 하중이 위치에 따라 무부하 또는 과부하가 되어 베어링 마멸, 발열 등 축계손상의 직접적인 원인으로 작용함을 인지하게 되었다. 일반적으로 지지베어링의 상하 또는 전후방향의 위치를 적절히 조정하고 지지베어링 개수를 적게, 지지베어링 간격을 크게 할수록 선체 변형의 영향에도 베어링 반력변화가 작아지므로 축계는 보다 안정된 상태가 된다. 이러한 연구결과[3]-[6]는 축계 지지 베어링의 고른 하중 배분을 유도하기 위한 자유곡선배치 축계정렬의 중요성을 잘 나타내고 있다.
또한 1990년대부터 선체 유연성 증가에 따른 선체 변형량이 커지면서 선미관 베어링의 손상사고가 크게 증가됨에 따라 선체변형과 관련된 연구가 활발히 진행되었다[7]-[11].
상기와 같은 배경에서 수행된 연구는 주로 준정적(quasi-static) 상태에서 수행되었다. 선박의 동적상태는 선급 규칙에 강제화 된 비틀림진동에 관한 분석이 대부분이라 할 수 있으며 간헐적으로 종진동, 횡진동에 관한 연구가 수행되고 있다[12]. 축 거동 연구에 관한 사항은 Saitoh에 의해 준 정적상태만 고려하였던 축계정렬 설계방식으로는 운전 시 프로펠러에서 발생되는 힘에 기인한 선미관 베어링 및 선미관 밀봉장치(seal ring)의 심각한 손상을 방지할 수 없음[13]이 분석된 바 있다. 이와 같은 관점에서 Kuroiwa, et al.에 의해 선박의 선회시 발생하는 프로펠러 편심 추력을 고려한 선미관 베어링의 건전성평가[14]가 수행되었으며 Takahashi, et al.의 유막 및 축 궤적분석 연구결과[15]는 프로펠러 편심추력이 축계에 미치는 영향을 잘 보여주고 있다. 같은 해 수행된 연구결과[16] 역시 반류분포에 의한 횡방향 프로펠러 하중(lateral propeller forces)이 선미관 베어링에 영향을 미치므로 이를 설계 과정에서 고려하여야 축계정렬을 성공적으로 이끌어 낼 수 있다는 것을 보여준다. 한국에서는 S. H. Shin에 의해 최근 선박의 직진, 선회시의 프로펠러 하중이 베어링에 미치는 영향에 관한 연구[17]가 수행되었다. 그러나 아직까지는 선박의 프로펠러 편심추력이 선미관 베어링에 미치는 영향을 모든 선종에 일괄적으로 적용할 수 없는 한계가 있다. 따라서 선종별 다수의 사례 분석을 통해 향후 통계적인 분석을 수행할 수 있을 기반을 마련해 나가는 것이 중요하다[18].
본 연구에서는 한국 조선소에서 다수 건조된 5만톤급 석유화학제품 운반선을 대상으로 밸러스트 흘수 조건에서 선박 운항 시 엔진 부하에 따른 프로펠러 편심추력이 추진축계에 미치는 영향을 검토하고자 한다.
2. 계측 및 해석방법
2.1 측정 설비의 구성
Table 1에서는 연구대상 선박의 축계사양을 Figure 1, Table 2에서는 축계 배치도와 측정을 위한 스트레인 게이지와 레이저 변위센서의 설치위치를 나타내었다.

Specification of the ship
Sensor connections

Shafting arrangement and position of strain gauge and laser sensor
측정을 위한 신호선, 밧데리 및 텔레메트리 송신장치(KIMA 사의 TPM)는 Figure 2와 같이 설치하였다. 또한 선미관 선수 밀봉장치(forward stern tube seal) 근방에 Pepperl+Fuchs 사의 레이저 변위 센서(VDM18-300)를 Figure 3과 같이 부착하고, 프로펠러 축에는 No.1 cylinder 상사점(TDC; top dead center) 위치에 5 mm 두께의 고무패드를 부착하여 프로펠러축 변위 및 회전속도를 측정 하였다.

Telemetry system configuration

Laser displacement sensor allocation
2.2 계측 절차
계측은 Table 3에서와 같이 밸러스트 흘수상태에서 수행하였다.
Test program of the NBE condition
여기서 밸러스트 흘수조건이란 공선 상태에서 프로펠러가 물속에 100% 잠긴 상태(100% propeller immersed condition)로써, 애프터 피크 탱크(APT)를 비운(normal ballast APT empty (NBE)) 조건을 의미한다. 대상선박의 선수/선미 흘수(draught)는 정지 시 각각 6.3 m/ 7.9m 이었다.
2.3 원신호의 처리
선박 직진 시 엔진 부하에 따라 프로펠러 편심 추력이축 거동 및 지지 베어링에 미치는 영향을 분석하기 위해서는 시간영역 기반 원 신호를 회전각 기반 선도로 변환하는 작업과 이를 궤도선도(orbit plot)로 나타낼 필요가 있다. 따라서 Figure 4에서와 같이 계측 위치에 두개의 센서를 축중심에서 서로 90˚간격을 두고 설치하고 회전속도 검출 목적의 변위센서를 설치하는 것이 일반적이다.

Typical displacement measurement configuration
이 경우, 한 센서로부터 발생하는 신호는 궤도선도의 수평축 입력이 되고 나머지 센서로부터 발생하는 신호는 수직축 입력이 된다.
이 직교 방향의 신호는 각각의 시간파형으로 표시하거나 두 신호를 결합하여 하나의 궤도정보로 나타낼 수 있다. 또한 정확한 변위 및 축의 궤도를 측정하기 위해서는 프로펠러 편심추력이 유발하는 진폭이 가장 큰 곳, 즉 선체 외부의 선미관 후부 실(seal) 근방에 비접촉 변위센서를 설치하고 각각의 순간에 수집된 X, Y 축 좌표 값으로 축 중심의 좌표를 구하는 것이 이상적이나[19], 이는 Figure 5에서와 같이 선미관 후부 즉, 해수에 노출된 위치에서 센서 설치 및 고정[20]을 위한 전용의 브라켓(bracket) 제작, 센서 및 안테나 트랜스미터 등의 방수, 방유조치가 필요하고 이에 따른 소요시간, 비용대비 편익(B/C) 측면에서 모든 선박에 대해 수행하기는 현실적인 제약이 있다.

An example of displacement measuring configuration
따라서 이에 대한 대체방법으로 기관실 내에 설치된 스트레인 게이지 정보로부터 계산한 모멘트 성분을 이용하여 궤도선도로 나타낼 수 있는데 이 방법은 전술된 계측법과 같이 축의 변위성분은 알 수 없지만 동적상태에서의 엔진 부하에 따른 축의 거동양상을 예측할 수 있어 비용대비 편익 측면에서 실용적이다. 스트레인 게이지로부터 수신되는 원신호 즉, 변형률(ϵ)은 스트레인 게이지 위치의 축 단면에서 발생하는 굽힘 모멘트로 다음과 같이 환산이 가능하다. 축 표면에 부착된 스트레인 게이지의 저항값은 축이 회전하면서 발생하는 수직 변형률(strain)에 비례하여 변동하므로 입력 전압 대비 변동된 출력 전압을 얻을 수 있다. 이를 통해 Figure 6에서와 같은 하프 휘스톤 브릿지(half wheatstone bridge) 결선방식에서 식 (1)과 같은 변형률 ϵ을 얻을 수 있다.
| (1) |

Typical half wheatstone bridge configuration
여기에서 Vek는 입력전압이며. Vo는 휘스톤 브릿지에서 측정된 출력전압이다. k는 스트레인 게이지 상수이다. 축의 모멘트를 측정하기 위해서는 축을 360°만큼 회전시키면 되고, 이때의 변형량은 축 회전각도에 따른 값으로 나타낼 수 있다. Figure 7에서 이러한 회전각에 따른 변형량의 변화 예를 나타내었다.

A typical example of strain curve
이러한 사인파형상의 변형량은 굽힘 모멘트, 축의 중립축과 스트레인 게이지 사이의 거리와 밀접한 관련이 있는데 이 관계를 수식으로 표현하면 식 (2)와 같이 나타낼 수 있다.
| (2) |
여기서, ϵa는 변형량 진폭(strain amplitude)을 나타내며, θ는 수직 방향과 게이지 사이의 각도, λ는 중립축(N-A; Nuetral Axis)과 수직상태 사이의 각도, ϵ는 평균변형량(average strain)을 나타낸다. 따라서 축 재료의 종탄성계수 E와 변형률을 이용하면 축의 굽힘응력 σb를 식 (3)과 같이 구할 수 있다.
| (3) |
여기에서, ϵa은 변형률, Mb는 축의 굽힘 모멘트, I는 축의 단면2차 모멘트, c는 축단면의 반지름을 나타낸다.
따라서, 축의 굽힘 모멘트 Mb는 보의 관계식을 적용하여 식 (4)와 같이 구할 수 있다.
| (4) |
여기서 Do는 축의 외경, Di는 축의 내경, Z는 축의 단면계수를 의미하며, 이를 통해 식 (5) 및 식 (6)과 같이 수직과 수평 모멘트를 계산할 수 있다.
| (5) |
| (6) |
산출된 굽힘 모멘트는 Figure 8과 같이 프로펠러 및 센서위치의 축 단면에 대해 회전좌표계(a rotating coordinate system)로 도시할 수 있다.

Definition of moment direction
또한 굽힘 모멘트를 궤도선도로 나타내기 위해서는 스트레인 게이지의 신호(원 신호)를 1/4회전(=90°)지연시켜 수평성분신호를 예측하는 것이 필요하며 시간기반 신호를 축 회전각 기반신호로 변환하는 작업 또한 필요하다. 시간기반신호(time domain signals)는 Figure 9와 같이 레이저 변위센서로 측정된 변위값을 통해 다음 변위신호 수신 시 까지의 시간을 식 (7)에서와 같이 축의 회전수로 환산하여 No.1 cylinder TDC 기준의 회전각 기반 신호로 변환할 수 있다.

Convert laser signal to shaft rpm
| (7) |
여기서 Si는 변위신호의 i번째 수신시점을 의미하며 상기와 같이 회전각 기반으로 변환된 원 신호와 지연신호를 조합하면 엔진 부하가 변동하는 전체 구간에서 발생되는 굽힘 모멘트 기반의 궤도선도를 얻을 수 있다.
3. 결과 및 고찰
본 절에서는 상기와 같은 방법에 의해 도출한 결과를 고찰한다. 먼저 Figure 10부터 Figure 12에서는 NBE 조건에서 엔진 부하별로 스트레인 게이지(SG) 5번부터 7번까지 전방향(synthesized) 파형신호를 회전각 기준으로 나타내었다.
Figure 13에서 Figure 15에서는 5번부터 7번까지의 엔진 부하별 스트레인 게이지 궤도선도를 보여준다.

Rotation angle domain signal of SG No. 7 at NBE condition

Rotation angle domain signal of SG No. 6 at NBE condition

Rotation angle domain signal of SG No. 5 at NBE condition
Figure 13에서 Figure 15에서는 5번부터 7번까지의 엔진 부하별 스트레인 게이지 궤도선도를 보여준다.

Orbit of SG No. 7 at NBE condition

Orbit of SG No. 6 at NBE condition

Orbit of SG No. 5 at NBE condition
스트레인 게이지 7번 및 6번에서는 엔진 부하변동에 영향을 받지 않고 진원형태의 안정적인 거동을 보였다. 진원을 가지려면 일차적으로 베어링의 수평 및 수직 강성이 같은 등방성 지지여야 한다. 선미관 베어링의 경우 선미구조에 압입되는 구조상 등방성 지지라 볼 수 있으며 따라서 궤적도 진원에 가깝게 나타나고 있음을 알 수 있다. 주목할 점은 중간 축 앞에 설치된 스트레인 게이지 5번의 경우, Figure 15에서와 같이 엔진부하 NCR 및 85% 위치에서 궤적의 장축(major axis)과 단축(minor axis)의 비가 3.7:1 인 타원형태의 궤적이 나타났다는 점이다. 이는 불평형 진동이 발생하고 있음을 나타낸다. 회전체에서 불평형 진동이 발생하는 원인은 문헌[21]을 통해 몇가지로 추정해 볼 수 있으나 본 사례에서의 주 원인은 이방성 지지에 의한 것으로 판단한다. 선박에서 통상 중간축 베어링은 하부 지지대(pedestal)에 의해 체결되기 때문에 수직방향의 강성만이 존재하며 회전하는 축에서 발생하는 수평 힘에 대해서는 상대적으로 취약함을 보인다. 따라서 궤적은 동일하지 않은 강성에 의해 어느 정도의 타원이 된다. 본 사례의 경우 축계 안정성 유지에는 부정적인 영향은 없을 것으로 판단되나 Figure 16의 화살표 방향과 같이 본 연구대상선박 동형선의 수개월 운항 후 개방검사 시 발견된 베어링과 축의 접촉면에서 편심이 발생한 점에 대해서는 다음과 같은 고찰이 필요하다.

Contact face of intermediate shaft bearing (lower side)
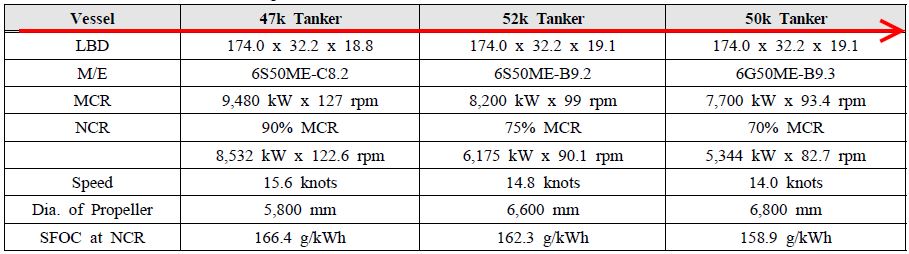
중간축의 편심현상은 엔진부하 25% 및 NCR사이 구간에서 발생한 프로펠러 편심 추력과 상관관계를 가진다. Table 4에서는 같은 급의 중형 석유화학제품 운반선 3척의 주요사항 변화의 추세를 비교하여 나타내었다. 운항 효율 증대의 목적으로 선박은 점차 엔진회전속도 및 선속을 낮추어 연료유 소모량을 줄이는 대신 프로펠러 직경은 증가시키는 추세이다. 이는 낮아진 선속을 큰 직경의 프로펠러 채용으로 보상하려는 기술적 추이와도 연관성이 높다. 프로펠러는 회전수가 낮고 직경이 클수록 효율이 높아지는 반면에 증가되는 편심추력이 장기적으로 중간축 베어링에 부정적인 영향을 미칠 수 있다는 점을 환기해야 할 것으로 판단되며, 향후 연구를 통해 선박 운항의 경제성 측면 외에도 본 연구에서 관찰된 중간축 이방성지지 문제와 프로펠러 편심추력에 의한 불평형 진동 및 정렬불량[21]에 대한 문제를 검토할 필요가 있다.
Technical trend of medium range tankers
마지막으로 프로펠러와 가장 가까운 위치인 스트레인게이지 7번 위치에서 굽힘응력 진폭에서는 큰 변동이 없으나 프로펠러 편심추력에 의해 축은 엔진 부하 증가에 따라 점차적으로 좌측 하방으로 이동하는 것을 알 수 있다. 기본적으로 프로펠러와 게이지 사이가 변형이 없는 직선보로 간주해도 무방하므로 프로펠러 위치에서의 축의 운동방향은 스트레인 게이지 7번 위치에서의 운동 방향과 반대인 우측상방으로 이동함을 추론할 수 있다.
이에 대한 검증으로 Figure 17 및 Figure 18에 나타낸 바와 같이 역계산 기법[18]을 통해 계측치와 설계치를 비교한 결과 양호한 일치를 보여 해석의 신뢰성을 확인할 수 있었다. 따라서 본 사례에서의 프로펠러 편심추력은 정지 시 대비 축을 선미관 베어링으로부터 들어 올리는 힘으로 작용하여 축과 베어링간의 상대경사각을 완화시키는데 기여하고 있음을 확인하였다. 그러나 서론에 기술한 바와 같이 본 연구는 5만톤급 석유화학제품운반선에 국한되어 수행된 바, 향후 다양한 선박의 사례를 통해 프로펠러 편심추력이 추진축계 안정성에 미치는 영향과 그에 따른 실용적 지침마련은 금후의 과제로 남는다.

Comparison measured and calculated bending moment at MCR(Maximum Continuous Rating) by a reverse calculation method

Comparison measured and designed propeller thrust force at MCR
4. 결 론
본 연구에서는 5만톤급 석유화학제품 운반선의 밸러스트 흘수 조건에서 선박 엔진 부하에 따른 프로펠러 편심추력이 축 거동에 미치는 영향을 검토하여 다음과 같은 결과를 얻었다.
- (1) 엔진부하 증가에 따라 비례적으로 증가하는 프로펠러 편심추력은 축의 거동에 영향을 미치는 주요 인자임을 확인하였다.
- (2) 프로펠러 편심추력은 정지 시 대비 축을 선미관 베어링으로부터 들어 올리는 힘으로 작용하여 축과 베어링 간의 상대경사각을 완화시키는데 기여하고 있음을 증명하였다.
- (3) 특정 엔진부하 구간에서 발생하는 편심추력은 등방성으로 지지되는 선미관 베어링과 달리 이방성지지상태에 있는 중간축 베어링에서 불평형 진동 진폭을 일으킨다. 이러한 현상이 축 거동에 미치는 영향은 그동안 축계 정렬 시에는 고려되지 않았던 점과 프로펠러 직경이 증가되는 추세를 고려하여 향후 연구에는 편심추력에 의해 유발되는 불평형 진동에 대한 검토가 필요하다.
Acknowledgments
이 논문은 2017년도 정부(과학기술정보통신부)의 재원으로 한국연구재단의 지원을 받아 수행된 연구(No. 2017R1C1B5017114)이며 이재웅의 박사학위논문(“중형 석유화학제품 운반선의 추진축계 안정성 평가에 관한연구, 한국해양대학교 대학원”)을 개선한 것이다.
References
- M. Rudolph, “A quarter century of propulsion shafting design practice and operating experience in the U.S. navy”, The Journal of the American Society of Naval Engineers, 71(1), p153-164, (1959).
- W. E. Lehr, and E. L. Parker, “Considerations in the design of marine propulsion shaft systems”, The International Journal of Society of Naval Architects and Marine Engineers, 69, p555-601, (1961).
- G. Mann, “Design of propulsion shaft systems using fair curve alignment theory”, The American Society of Naval Engineers Journal, 76(6), p851-862, (1964).
-
G. Mann, “Analysis of shafting problems using fair curve alignment theory”, The American Society of Naval Engineers Journal, 77(1), p117-133, (1965).
[https://doi.org/10.1111/j.1559-3584.1965.tb05656.x]

-
G. Mann, “Shipyard alignment of propulsion shafting using fair curve alignment theory”, The American Society of Naval Engineers Journal, 77(4), p651-659, (1965).
[https://doi.org/10.1111/j.1559-3584.1965.tb04996.x]
- T. A. Wilkin, and W. Strassheim, “Some theoretical and practical aspects of shaft alignment”, IMAS Conference 73 of The Institute of Marine Engineers, (1973), [Online]. Available: http://trid.trb.org/view.aspx?id=11182 Accessed March 22, 2016.
- Nippon Kaiji Kyokai (NK), Guidelines on Shafting Alignment, Japan, NK, (2006).
- Wärtsilä, Amendment and Update of the Infromation Provided in Design Group 9709, “Engine Alignment.”, Switzerland, Wärtsilä, (2007).
- MAN Dieset & Turbo (MDT), Bearing Load Measurement by Jacking Up, Rev.8, Denmark, MDT, (2012).
- MAN Dieset & Turbo (MDT), Crankshaft Deflection Shop Trial and Sea Trial / Site Trial, Acceptance Criteria, Rev.18, Denmark, MDT, (2014).
-
J. U. Lee, “A study of the analysis of shaft alignment considering hull deflections for 50,000 DWT oil/chemical tankers”, Journal of the Korean Society of Marine Engineering, 40(3), p191-197, (2016), (in Korean).
[https://doi.org/10.5916/jkosme.2016.40.3.191]
-
J. U. Lee, “Theoretical and experimental analysis of th lateral vibration of shafting system using strain gauges in 50,000-DWT oil/chemical tankers”, Journal of the Korean Society of Marine Engineering, 40(4), p301-306, (2016), (in Korean).
[https://doi.org/10.5916/jkosme.2016.40.4.301]
-
T. Saitoh, “Dynamic alignment taking account of propeller forces and stern tube bearing performances”, Journal of the Marine Engineering Society in Japan, 18(2), p142-153, (1983), (in Japanese).
[https://doi.org/10.5988/jime1966.18.142]
- R. Kuroiwa, A. Oshima, T. Nishioka, T. Tateishi, K. Ohyama, and T. Ishijima, “Reliability improvement of stern tube bearing considering propeller shaft forces during ship turning”, Mitshbishi Heavy Industries, Ltd. Technical Review, 44(3), p1-3, (2007).
- S. Takahashi, S. Matsumoto, T. Tateishi, K. Ohyama, R. Kuroiwa, and S. Morohoshi, “Study on oil film analysis of the stern tube bearing under the conditions of dynamic propeller shaft forces”, The Japan Society of Mechanical Engineers, Trans.C, 75(759), p3054-3061, (2009), (in Japanese).
- B. J. Vartdal, T. Gjestland, and T. I. Arvidsen, “Lateral propeller forces and their effects on shaft bearings”, First International Symposium on Marine Propulsors, p475-481, (2009).
- S. H. Shin, “Effects of propeller forces on the propeller shaft bearing during going straight and turning ship”, Journal of the Society of Naval Architects of Korea, 52(1), p61-69, (2015), (in Korean).
-
J. U. Lee, “A study on the analysis of bearing reaction forces and hull deflections affecting shaft alignment using strain gauges for a 50,000 DWT oil/chemical tanker”, Journal of the Korean Society of Marine Engineering, 40(4), p288-294, (2016), (in Korean).
[https://doi.org/10.5916/jkosme.2016.40.4.288]
- B. S. Yang, Condition Monitoring & Diagnostics, Korea, Intervision, (2006), (in Korean).
- American Bureau of Shipping, http://www.sname.org/HigherLogic/System/DownloadDocumentFile.ashx? DocumentFileKey=1a56a8ba-d5b7-4e98-becd-8c09be30ccdd, Accessed August 23, 2017.
- Incosys, Vibration and Equipment handbook, http://www.incosys.co.kr/index.php/book/book-table?id=945 Accessed March 25, 2017.